Recent Posts
-
6809 Emulator
The 6809 is a great little bit of vintage tech. Read about it here. So what if you want to get started writing code and experimenting with this microprocessor? Well, you could buy an old computer system with one inside, like the TRS-80 Color Computer. You might find one for a few hundred bucks and…
-
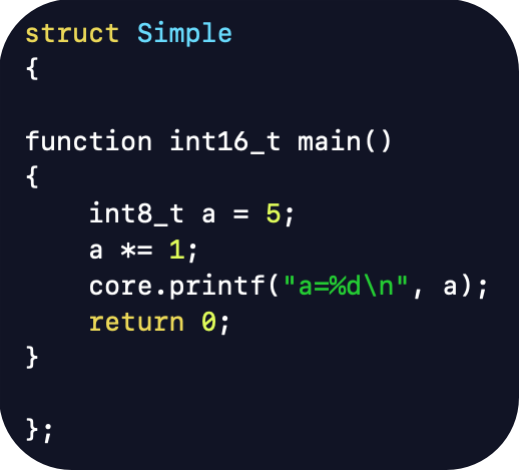
Clover
This will be an article about my C-like language, Clover. For now head over to the GitHub repository to check it out. Here’s a little sample of some clover code:
-

Meet the Motorola MC6809
The MC6809 was an 8 bit microprocessor designed by Motorola in the late 70’s. It holds a special place for me because when I was first working in the software industry it represented the pinnacle of microprocessor design for that era. It was never used much, 16 bit processors came out soon after and the…
-
Placid
Placid is a cross-platform operating system for embedded systems. It can run on platforms as small as Arduino and ESP8266 all the way up to Raspberry Pi. The source code is available with an MIT license from GitHub. Motivations I started thinking about bare metal programming on the Raspberry Pi when I tried running OctoPrint (https://octoprint.org)…
-

Quick Project: New Life for Clock
I have this Frank Lloyd Wright desk clock. I love the art and simplicity of it. In fact I love it so much that I’ve had it on my nightstand for 2 years without it working! The problem is that the single AA battery last for less than 2 months and I finally got tired…